


 科学进展
科学进展侧生两束鞭毛趋磁细菌运动机制的建模和分析
副标题:
趋磁细菌能够借助细菌鞭毛旋转提供的动力沿着磁力线运动,通过显微观察和建模分析这种趋磁运动可为研究趋磁细菌的趋磁特性提供参考。此文通过把趋磁细菌MO-1看做一个具有两根刚性鞭毛的椭球体,并考虑细菌运动时和液体的相互作用力、以及磁小体链和外加磁场的磁转矩等作用,建立了趋磁细菌MO-1的动力学模型(图一)。
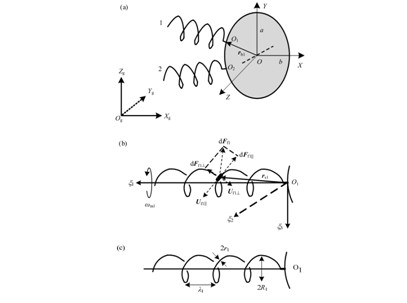
图一
模型分析结果表明MO-1的运动轨迹是由一大一小两种螺旋组成,小螺旋是由鞭毛旋转导致的,而大螺旋则是由于菌体旋转和鞭毛推动力的方向不一致形成的(图二)。
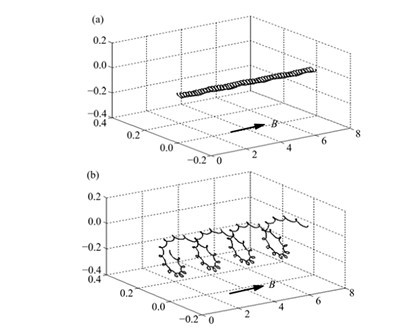
图二
以此模型仿真的趋磁细菌MO-1在磁场下运动轨迹、运动速度等与通过显微观察和视频记录下的运动情况基本吻合(图三)。同时通过模型仿真,趋磁细菌MO-1鞭毛的旋转速度估计为1100Hz,这与其他钠离子驱动的鞭毛的旋转速度一致,并且通过仿真结果分析,MO-1胞内磁小体链的夹角预计在40度左右,位于电镜观察到的结果20-60度。
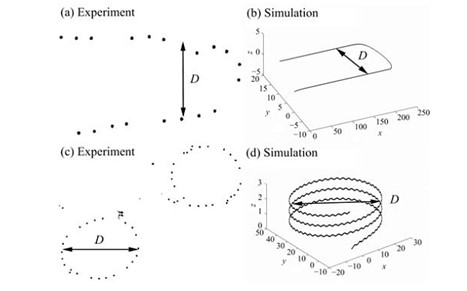
图三
因此模型的建立和分析基本符合趋磁细菌MO-1的真实运动轨迹,为分析和模拟趋磁细菌运动机制具有重要意义,同时也为如何建立仿真机器人建立良好的基础。
此研究成果已由中科院电工所生物电工研究组杨岑玉和宋涛等人发表在《Journal of Bionic Engineering》杂志上。
Dynamic Model and Motion Mechanism of Magnetotactic Bacteriawith Two Lateral Flagellar Bundles
Cen-Yu Yang, Chuan-Fang Chen, Qiu-Feng Ma, Long-Fei Wu, Tao Song